ISRO PSLV-C60 SpaDeX to Launch Today: Why India is Eager for This Historic Mission?
Updated on : 30 December, 2024

Image Source: Adobe Stock
Table Of Contents

- 1. What is the PSLV-C60 Mission?
- 2. Launch Details
- 3. Live Broadcast
- 4. Mission Objectives
- 5. Key Components of the SpaDeX Mission
- 6. New Technologies
- 7. Docking Mechanism Explained
- 8. Sensor Suite
- 9. Rendezvous and Docking Algorithms
- 10. ISL-Enabled GNSS-Based RODP
- 11. Post-Docking Activities
- 12. Challenges in In-Space Docking
- 13. Spacecraft Development
- 14. Mission Phases and Timeline
- 15. Expected Outcomes and Future Implications
- 16. Conclusion
Table Of Contents

What is the PSLV-C60 Mission?
The PSLV-C60 mission is a significant step for the Indian Space Research Organisation (ISRO), as it aims to demonstrate advanced in-space docking technology through the SpaDeX (Space Docking Experiment) mission. This mission involves launching two small spacecraft, designated SDX01 (the Chaser) and SDX02 (the Target), into low Earth orbit (LEO). Both spacecraft weigh approximately 220 kg each and will be launched simultaneously by the PSLV-C60 rocket.
The primary goal of the PSLV-C60 mission is to develop and demonstrate the technology required for rendezvous, docking, and undocking of spacecraft in space, which is crucial for future missions involving human spaceflight, satellite servicing, and potentially establishing an Indian space station.
Launch Details

Image Source: ISRO
The PSLV-C60 mission is scheduled to launch from the Satish Dhawan Space Centre (SDSC) SHAR in Sriharikota, Andhra Pradesh. The launch window was carefully chosen based on optimal orbital conditions required for the mission objectives.
Key Launch Details
The PSLV-C60 that would launch the SpaDeX mission or the Space Docking Experiment was to be launched at 9:58 PM, but now it has been pushed to 10:00 PM.
- Date: December 30
- Time: 10:00 PM IST (11:30 AM EST / 16:30 GMT)
- Launch Vehicle: PSLV-C60
- Launch Pad: First Launch Pad (FLP)
This launch marks a critical milestone in ISRO's advancements in space technology.


Live Broadcast
ISRO has made arrangements to ensure widespread access to the launch event. Viewers can tune into multiple platforms to watch the live coverage:
- ISRO's Official YouTube Channel: Live streaming of the SpaDeX mission will begin at 9:30 PM IST (11:00 AM EST / 16:00 GMT). The broadcast will feature expert commentary and real-time telemetry updates.
PSLV-C60/SPADEX Mission Live Streaming
Millions of viewers worldwide are expected to watch this historic event unfold in real-time.
Mission Objectives
The primary objectives of the SpaDeX mission include:
- Demonstrating In-Space Docking: The main goal is to develop technology that allows two spacecraft to dock autonomously in space.
- Testing New Technologies: The mission will test various new technologies that could be used in future space missions.
- Supporting Future Missions: Successful docking technology is essential for future missions, including potential lunar landings and the establishment of India's own space station.
PSLV-C60 SPADEX Mission Brochure
Key Components of the SpaDeX Mission
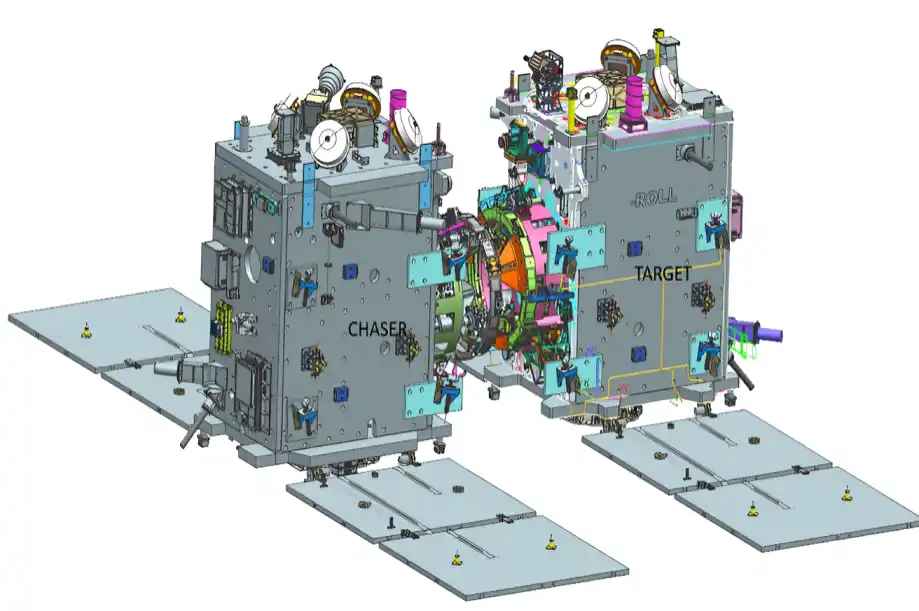
Image Source: ISRO
Spacecraft Overview
- SDX01 (Chaser): This spacecraft will approach SDX02 for docking.
- SDX02 (Target): This spacecraft will remain relatively stationary while SDX01 approaches for docking.
Payloads
Each spacecraft carries specific payloads designed to conduct various scientific experiments:
- SDX01: Equipped with a high-resolution camera for capturing images of Earth.
- SDX02: Contains a miniature multispectral payload and a radiation monitor to study natural resources and environmental conditions.
POEM-4
The fourth stage of the PSLV-C60 will serve as an experimental platform known as POEM-4 (PSLV Orbital Experimental Module-4). It will carry a total of 24 secondary payloads that will be activated once the primary payloads are deployed in space.

New Technologies
The technologies developed indigenously to support this docking mission include:
- A specialized docking mechanism
- A set of four advanced sensors for rendezvous and docking
- Technology for transferring power between spacecraft
- A unique autonomous strategy for rendezvous and docking
- An inter-satellite communication link (ISL) enabling autonomous communication between the spacecraft, equipped with intelligent systems to monitor the state of the other spacecraft
- A GNSS-based processor for Novel Relative Orbit Determination and Propagation (RODP), designed to calculate the relative position and velocity of the other spacecraft
- Simulation platforms to validate and test both hardware and software designs
Additionally, the SpaDeX mission, due to its compact size and low mass, presents a greater challenge as it requires highly precise maneuvers for rendezvous and docking, in contrast to docking larger spacecraft. This mission serves as a precursor to autonomous docking technologies that will be critical for future lunar missions, such as Chandrayaan-4, which must operate without GNSS support from Earth.
Docking Mechanism Explained

Image Source: India Today
The docking mechanism is designed as a low-impact system, with an approach velocity of approximately 10 mm/s. It is androgynous, meaning both spacecraft (the Chaser and Target) use identical docking systems. Additionally, it features a peripheral docking design, similar to the International Docking System Standard (IDSS) employed by other space agencies for human spaceflight missions.
This mechanism is compact, with a diameter of 450 mm, and operates with a single degree of freedom for extension, powered by two motors. In comparison, the IDSS is larger (800 mm in diameter) and utilizes a hexapod structure with 24 motors. To ensure the docking approach parameters were optimized and validated, multiple test beds were established for both hardware and software simulations of the docking kinematics.
Sensor Suite
This mission features an advanced suite of sensors for precise measurements and operations. The Laser Range Finder (LRF) and Corner Cube Retro Reflectors can measure distances between 6000 m and 200 m, providing accurate range (R) information. The Rendezvous Sensors (RS) operate in two ranges: 2000 m to 250 m and 250 m to 10 m, delivering the relative position (x, y, z). While the LRF independently determines both relative position and velocity, the RS focuses on positional data.
The Proximity and Docking Sensor (PDS) is responsible for measuring relative position and velocity within a closer range of 30 m to 0.4 m. Laser Diodes (LDs) serve as targets for both the RS and PDS, enhancing their accuracy. For the final stages of docking, a video monitor captures the event from a distance of 20 m to 0.5 m. The Mechanism Entry Sensor (MES) detects the Chaser spacecraft’s entry into the Target spacecraft at close ranges of 8 cm to 4 cm during docking.
All these sensors underwent extensive calibration and validation using multiple test beds to ensure their reliability and performance for the mission.

Rendezvous and Docking Algorithms
For inter-satellite distances (ISD) of up to 5 km, standard orbit maintenance and attitude control algorithms, commonly used in ISRO’s low-Earth orbit (LEO) spacecraft, are applied. Since the spacecraft are in circular orbits, any increase or decrease in their velocity alters their orbit. To manage this, the V-bar strategy is implemented using n-Pulse, Glideslope, and PV guidance algorithms. These are used to gradually reduce the ISD, maintain fixed distances to test sensors and software, and ultimately perform docking.
The algorithms were translated into software solutions specifically designed for rendezvous and docking operations. These solutions underwent extensive validation and testing through various simulations, including digital, hardware-in-loop, onboard-in-loop, software-in-loop, and robotic environments.
ISL-Enabled GNSS-Based RODP
Like all ISRO satellites in low-Earth orbit, both SpaDeX spacecraft are equipped with a differential GNSS-based Satellite Positioning System (SPS), which provides Position, Navigation, and Timing (PNT) solutions. In this mission, the SPS receiver incorporates an innovative RODP (Relative Orbit Determination and Propagation) processor, enabling precise calculation of the relative position and velocity between the Chaser and Target spacecraft.
This is achieved by subtracting the carrier phase measurements from the same GNSS satellites in the SPS receivers of both spacecraft, resulting in highly accurate relative state data. The VHF/UHF transceivers onboard each satellite facilitate this process by transmitting GNSS satellite measurements between the Chaser and Target. Extensive testing, including hardware and software simulations with closed-loop verifications, was conducted to evaluate and optimize the RODP processor's performance.
Post-Docking Activities
After completing the docking and undocking maneuvers, the spacecraft will be repurposed for application missions.
-
SDX01 is equipped with a High-Resolution Camera (HRC), a compact version of the surveillance camera developed by SAC/ISRO. From an altitude of 450 km, it provides an Instantaneous Geometric Field of View (IGFOV) of 4.5 m. The camera offers a swath of 9.2 x 9.2 km in snapshot mode and 9.2 x 4.6 km in video mode.
-
SDX02 carries a Miniature Multi-Spectral Payload (MMX), also developed by SAC/ISRO. It operates across four Visible and Near Infrared (VNIR) bands (B1/B2/B3/B4) with wavelengths ranging from 450 nm to 860 nm. From a 450 km altitude, it delivers an IGFOV of 25 m and a 100 km swath, making it ideal for natural resource monitoring and vegetation studies.
Additionally, SDX02 hosts a Radiation Monitor (RadMon) payload, designed to measure radiation doses encountered in space. The data collected will contribute to a radiation database for future Total Ionization Dosimeter (TID) and Single Event Upset (SEU) measurements, aiding space science research and applications in human spaceflight.
Challenges in In-Space Docking
In-space docking presents several challenges:
- High Relative Velocities: Spacecraft travel at speeds around 28,800 km/h, making precise control critical.
- Low Mass Sensitivity: Small changes can significantly affect alignment due to lower inertia in small satellites like those used in SpaDeX.
- Autonomous Operation: Ensuring reliable autonomous operations without human intervention requires rigorous testing and validation of all systems involved.
Spacecraft Development

Image Source: ISRO
The SpaDeX spacecraft were developed and built by the UR Rao Satellite Centre (URSC), with support from other ISRO centers, including VSSC, LPSC, SAC, IISU, and LEOS. During the orbital phase, the spacecraft will be monitored and controlled by ISTRAC using ISRO’s ground stations, supplemented by externally hired ground stations.
The full integration and testing of the satellites were conducted at M/s Ananth Technologies, Bangalore, under the supervision of URSC. Having completed all necessary tests and clearances, the spacecraft have been transported from URSC to SDSC and are now undergoing final launch preparations.
Mission Phases and Timeline
Pre-launch Preparations
Before launch day:
- Final testing was conducted on all systems.
- Payload integration was completed successfully at ISRO’s facilities.
Launch Phase
During launch:
- The PSLV-C60 rocket lifts off into orbit carrying both SDX01 and SDX02.
- After reaching orbit, they separate from the rocket's fourth stage before commencing their docking maneuvers.
Post-launch Timeline
The timeline following launch includes:
- Initial separation followed by a gradual approach over several days.
- Successful docking expected within 10-14 days after launch.

Expected Outcomes and Future Implications
If successful, SpaDeX will have far-reaching implications for India’s future space endeavors:
- India would join an elite group of countries capable of performing in-space docking operations.
- This capability could support future missions involving human spaceflight, lunar exploration, and building an Indian space station known as Bharatiya Antariksh Station (BAS).
- The technologies developed could also benefit international collaborations in space exploration initiatives.
Conclusion
The PSLV-C60 SpaDeX mission represents a pivotal moment in India’s journey towards advanced space exploration capabilities. By successfully demonstrating in-space docking technology, ISRO not only enhances its own capabilities but also positions India as a key player on the global stage in space exploration efforts.
As we anticipate this historic launch on December 30, 2024, there is immense excitement surrounding its potential outcomes and implications for future missions beyond Earth’s atmosphere—opening doors to new possibilities in our quest to explore outer space further than ever before!
 Properties for Rent in GurugramProperties for Rent in DelhiProperties for Rent in FaridabadProperties for Rent in KolkataProperties for Rent in PuneProperties for Rent in Greater NoidaProperties for Rent in JaipurProperties for Rent in AhmedabadProperties for Rent in BengaluruProperties for Rent in Lucknow
Properties for Rent in GurugramProperties for Rent in DelhiProperties for Rent in FaridabadProperties for Rent in KolkataProperties for Rent in PuneProperties for Rent in Greater NoidaProperties for Rent in JaipurProperties for Rent in AhmedabadProperties for Rent in BengaluruProperties for Rent in Lucknow